Cal Poly Mars Mini Space Rover
Led the wire harnessing team for the Cal Poly Mini Rover, a fully student-designed system being developed for Mars deployment by 2030. Designed and implemented the 2025 harness architecture supporting sensors, motors, and power systems.
Collaborated closely with sensor and motor subsystem teams to develop durable interconnects capable of withstanding extreme temperature changes and dust exposure on Mars.
Oversaw connector selection, soldering, and harness assembly while mentoring team members on routing, protection, and subsystem integration. Applied strong organization, precision, and teamwork skills throughout the project.
Technical Skills: Harness architecture design, soldering, connector selection, subsystem integration, sensor/motor interfacing, power systems design
Personable Skills: Leadership, organization, precision, teamwork, mentoring
Visit Poly Rover Website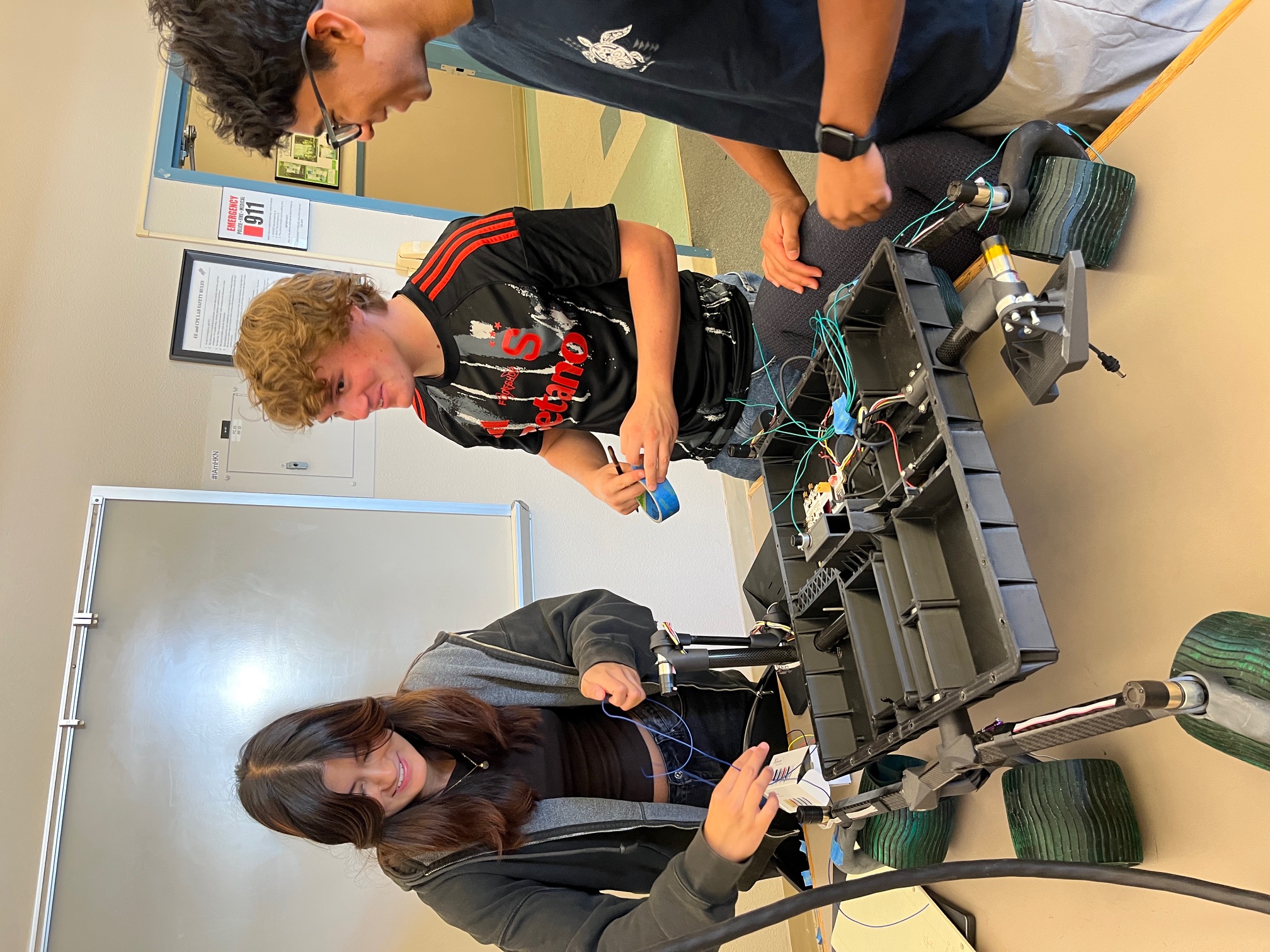
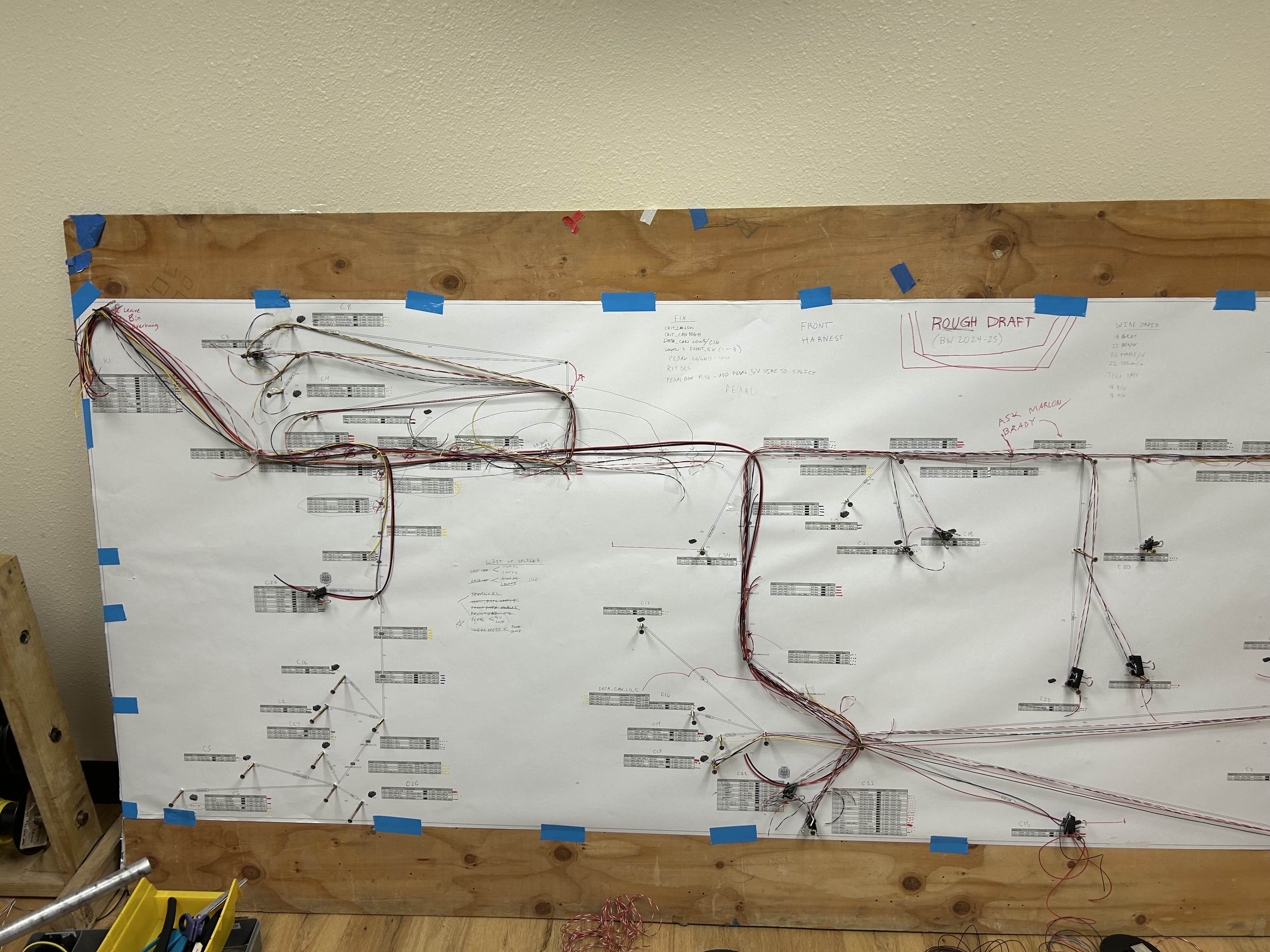
Cal Poly Racing FSAE
Contributed to the design, CAD modeling, and assembly of the front wire harness for Cal Poly’s Formula SAE vehicle using Siemens NX and Rapid Harness. Worked to enhance the layout of electrical components and refine system connectivity, improving reliability and ease of maintenance.
Measured wire paths through the chassis using string to match actual lengths in Siemens NX, ensuring accurate routing.
Gained hands-on experience splicing wires and selecting and crimping connectors to create clean, reliable connections. Used Rapid Harness to generate wiring schematics and documentation, ensuring the final harness matched the digital design.
Technical Skills: CAD modeling, wire harness design, Siemens NX, Rapid Harness, connector selection, splicing and crimping, schematic generation
Personable Skills: Communication, collaboration, attention to detail, problem-solving

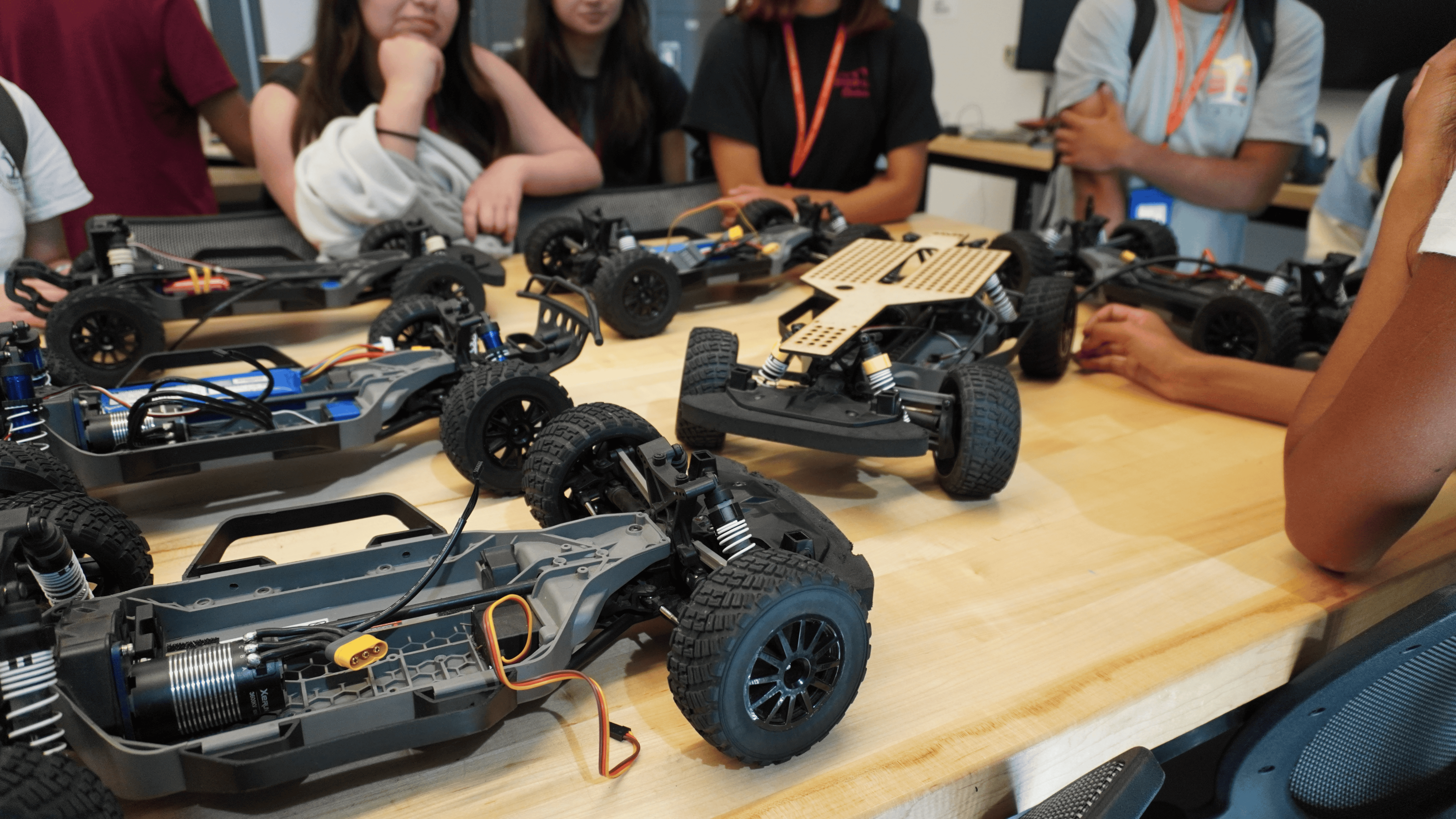
COSMOS Student Researcher – UC San Diego
Conducted research in autonomous systems at UC San Diego through the COSMOS program, guided by Professor Jack Silberman.
Collaborated in a team of three to design and implement an autonomous RC vehicle using the DonkeyCar AI Framework, human behavior cloning, OpenCV, and Embedded Linux. Engineered and fabricated a custom base plate and LIDAR mount with OnShape, 3D modeling, and laser cutting, successfully integrating hardware and software to achieve a fully autonomous lane-following vehicle.
Technical Skills: Autonomous systems, DonkeyCar AI Framework, OpenCV, Embedded Linux, behavior cloning, OnShape, 3D modeling, laser cutting, hardware/software integration
Personable Skills: Collaboration, problem-solving, adaptability, communication, innovation